
![]()
The microrobotic laser-steering end-effector can be used as a fitted add-on accessory for existing endoscopic systems for use in minimally invasive surgery. [Image: Wyss Institute at Harvard University]
More and more, physicians are picking up surgical lasers to cut, debride and cauterize tissue. And when combining lasers with another major medical trend—minimally invasive surgery—the surgical team needs to manipulate the laser through a tiny incision.
A new laser-steering electromechanical microrobot could make endoscopic surgery easier and more precise (Sci. Robot., doi: 10.1126/scirobotics.abd5476). The miniaturized device, just 6 mm by 11 mm in size, fits into existing endoscopic surgical devices and delivers radiation through a fiber connection.
Meeting the challenges
Previous attempts to control a laser at the end of a minimally invasive surgical tool fall into two general categories: fiber steering and optical steering. In the former, magnets and electromagnetic coils, or sometimes cables or push-pull rods, physically bend the tip of the optical fiber; the latter method uses mirrors or prism to direct the laser beam after it emerges from the end of the fiber. Both approaches have their drawbacks—the first with speed or range of motion, the second with lack of miniaturization.
To overcome these challenges, researchers led by Peter A. York and Robert J. Wood of Harvard University, USA, designed a laser-steering system that incorporates piezoelectric bending actuators and three miniature rotating mirrors.
The laser beam enters the microrobot through an optical fiber, and a gradient-index collimating lens narrows and aligns the beam. While designing the device, the team assumed the beam would be 1 mm wide at this point. A miniature plano-convex lens focuses the light, and a fixed mirror reflects it at a 90-degree angle. Next in the light path are the controllable mirrors, which direct the beam onto the surgical site.
Laser fabrication, modular assembly
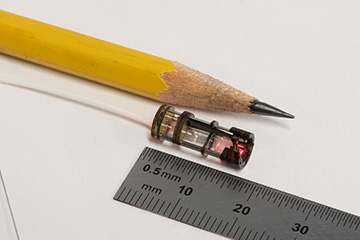
Size comparison of the microrobotic laser-steering end-effector with a pencil. [Image: Wyss Institute at Harvard University]
To build the device, the Harvard researchers combined off-the-shelf parts with custom-designed components that they built with laser-micromachining tools. To put the pieces together, the team needed to develop a new modular assembly technique that will streamline the assembly process for future versions of the device.
The scientists demonstrated their proof-of-concept microrobot only with a low-power red laser pointer. York calls it an “important limitation of our study” and adds that the team is now working on integrating the laser-steering technology with the types of high-power lasers—most often carbon-dioxide lasers—used in modern surgery.