
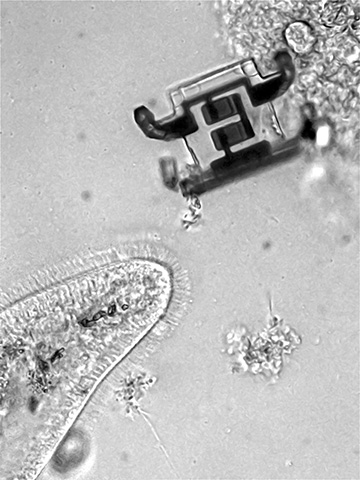
The microrobots created by the Cornell team are comparable in size to protozoa, such as the paramecium shown in this photomicrograph. [Image: Cornell University]
A research team led by scientists at Cornell University, USA, has devised an approach for mass-producing more than a million microbe-sized, electrochemically activated walking robots from a single four-inch silicon wafer (Nature, doi: 10.1038/s41586-020-2626-9). The team showed how the microrobots, powered by tiny onboard silicon photovoltaics, could be released en masse and made to saunter through an electrolytic fluid by the firing of a sequence of laser pulses at different PV patches on each bot.
The researchers admit that the simple prototypes they’ve created are “much slower” than swimming microrobots demonstrated by some other teams. The new bots also currently lack the onboard sensors and logic circuits necessary for them to function autonomously. But the team believes that by proving out a CMOS-compatible production scheme for fashioning microscopic robots that can walk with only nanowatts of applied power, it has created a platform that can evolve rapidly. The work, the authors conclude, thus constitutes “an important advance towards mass-manufactured, silicon-based, functional robots that are too small to be resolved by the naked eye.”
Making microrobot bodies
The new work was led by Cornell scientists Itai Cohen and Paul McEuen, along with postdoc and first author Marc Miskin (who has since joined the faculty at the University of Pennsylvania). Motivating the team was the quest for a micrometer-scale system that could drive microrobots using standard electronic control signals—yet that was still compatible with commercial CMOS processing.
The fabrication system that the Cornell researchers devised to get there began with the creation of a backbone of photovoltaics to serve as the body of the walking robot. Starting with a conventional boron-doped, p-type silicon-on-insulator (SOI) wafer, the team laid down an additional doped layer on the wafer surface to allow the creation of n-type junctions. The team then used etching and other semiconductor-fab techniques to selectively remove the p and n layers to create the PV structure, deposit electrical contacts and pattern the buried oxide layer that forms the body of each microrobot.
Doing the legwork

An array of microscopic robots, shown before release. [Image: Marc Miskin] [Enlarge image]
The result of this process is a field of more than a million microscopic robot bodies, each 40×40 or 40×70 µm in area, decorated with wired-up PV patches and arrayed in orderly rows across the wafer surface. The next step is to attach the legs—or, in the paper’s parlance, the surface electrochemical actuators (SEAs).
These are created by using thermal atomic layer deposition to put down a 7-nm-thick veneer of platinum, and then etching off the metal in all areas except either side of the robot, where the metal sticks out in leglike projections. The platinum is capped with a layer of titanium, and then wired to the silicon PVs with additional sputter-deposited metal interconnects.
To release the fully formed microrobots from the wafer, the team deposits a temporary aluminum supporting layer on top of the microrobots. Vapor-phase etching then cuts away the silicon substrate beneath the bots, and the robot bodies are picked up using a polymer stamp, planted on a new substrate and covered with an aqueous solution containing a highly dilute aluminum etchant. The etchant clears away the aluminum support layer, allowing the million or more microrobots to float free in the solution.
Stately pace
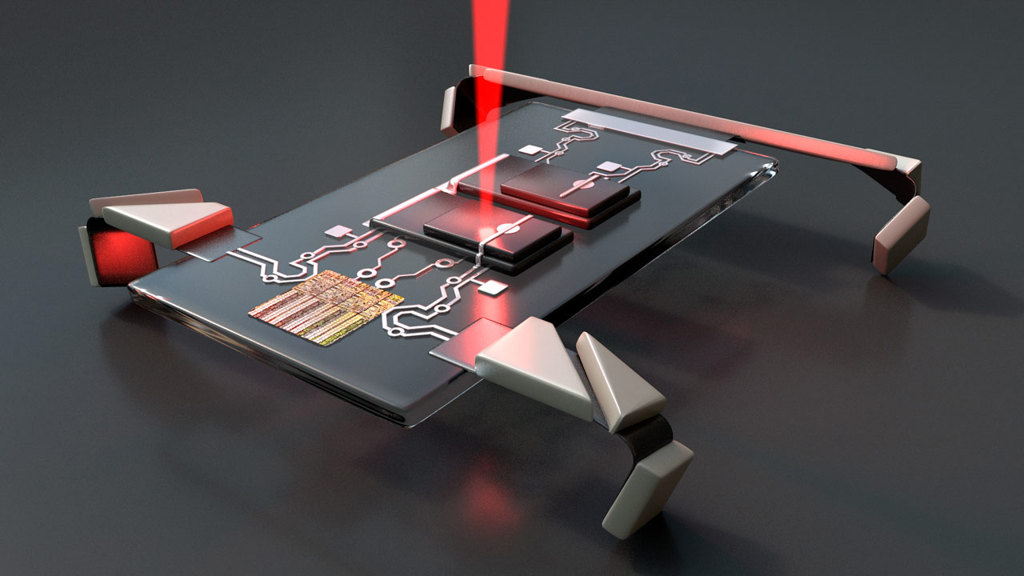
Artist rendering of microrobot. A laser pulse, fired at one of the silicon photovoltaics on the robot body, creates a voltage bias that causes the robot’s platinum legs to absorb or desorb ions in the surrounding aqueous electrolyte; that, in turn, changes the surface stress in the platinum, causing it to twist or straighten. Using the laser to selectively excite different PV patches on the robot, the team was able to control the bot’s motion. [Image: Cornell University] [Enlarge image]
The legs of the microrobots are designed to flex and bend electrochemically. First, a 785-nm laser pulse is fired at the photovoltaic patch wired to one of the SEAs on the bot, creating a photocurrent that passes into the SEA. The voltage bias between the SEAs and the surrounding aqueous electrolyte causes ions in the solution to glom onto (or drop off of) the platinum surfaces. That, in turn, changes the surface stress and causes the leg to curl, at a curvature that varies depending on the electric potential.
The team tested the bots in three different kinds of solutions—one associated with hydrogen adsorption, one with the adsorption of selective oxygen species, and one with surface oxidation. By shining the laser light on PV patches actuating the front and back legs in sequence, the team was able to nudge the robots along at a stately pace averaging around a micron a second, or roughly one robot body length per minute.
Toward microrobot surgeons?
A video, sped up eight times, shows one of the laser-controlled microrobots moving across a microscope slide. [Video source: Marc Miskin/YouTube]
That pace, the authors note, is considerably slower than various other swimming microrobots that have been demonstrated in recent years. And right now the bots are essentially “marionettes,” without onboard sensors and with the energy supply and decision-making functions outsourced to remote operators.
But the Cornell team expects that to change rapidly. The key advance here, the researchers say, is the creation of a process for mass-producing elecrochemically actuated microrobots in a CMOS-compatible manufacturing environment. This, they suggest, will allow engineers to “leverage 50 years of research in semiconductor electronics, manufacturing, packaging and integration” to soup-up the microrobot chassis with onboard transistors and sensors. Those mods conceivably could allow the platform to be used to create robots that could autonomously explore microenvironments and even some biological systems, with a power budget of only 10 nW per bot.
In a commentary accompanying the published paper, Allan Brooks and Michael Strano of MIT suggested that such work would “undoubtedly bring us closer” to Richard Feynman’s vision, articulated more than 60 years ago, of “swallowing the surgeon”—of ingestible microrobots that could carry out operations autonomously within the human body. And the price looks right. The Cornell team estimates that its system could allow such microrobots to be manufactured in commercial silicon foundries at a cost of around one-tenth of a cent per robot.